Máy Đo Tốc Độ Hàng Hải: Phân Tích Kỹ Thuật DVL, Log Điện Từ và Quản Lý Năng Lượng

Kiểm soát động lực học chính xác: Phân biệt tốc độ xuyên nước và tốc độ trên mặt đất để tối ưu hóa điều động và hiệu suất nhiên liệu.
1. Mở Đầu: Tầm Quan Trọng Của Vận Tốc Trong An Toàn và Hiệu Quả
Máy Đo Tốc Độ (Speed Log) là thiết bị hàng hải cơ bản, cung cấp thông tin vận tốc cần thiết cho hầu hết các hoạt động điều động và tính toán. Dữ liệu tốc độ chính xác là nền tảng để tính toán Định vị Ước tính (Dead Reckoning), hỗ trợ ARPA trong việc theo dõi mục tiêu, và quan trọng nhất, kiểm soát việc tuân thủ các quy định về tốc độ trong luồng lạch và cảng. Với yêu cầu ngày càng cao về hiệu suất nhiên liệu (Fuel Efficiency), việc phân biệt và đo lường chính xác các loại tốc độ trở nên then chốt.
Bài viết này tập trung vào sự khác biệt giữa hai loại tốc độ cơ bản (STW và SOG), các công nghệ đo lường chuyên sâu (Log Điện Từ và Log Doppler), và vai trò của chúng trong quản lý năng lượng và an toàn hàng hải.
2. Phân Biệt Các Loại Tốc Độ và Ứng Dụng Chiến Thuật
Máy đo tốc độ cung cấp hai loại vận tốc có nguồn gốc vật lý khác nhau, mỗi loại phục vụ một mục đích chiến thuật riêng.
2.1. STW (Speed Through Water - Tốc độ Xuyên Nước)
- Định nghĩa: Vận tốc của tàu so với khối nước xung quanh.
- Ứng dụng: Là chỉ số chính để đánh giá Hiệu suất Thủy động lực học (Hydrodynamic Performance) của tàu, kiểm soát vòng quay chân vịt (RPM) để tối ưu hóa tiêu thụ nhiên liệu. Sự khác biệt giữa tốc độ vòng quay dự kiến và STW thực tế có thể chỉ ra vấn đề về hà bám (Fouling) dưới đáy tàu.
2.2. SOG (Speed Over Ground - Tốc độ Trên Mặt Đất)
- Định nghĩa: Vận tốc của tàu so với đáy biển (hoặc mặt đất).
- Ứng dụng: Đây là tốc độ thực tế của tàu so với mục tiêu và địa hình, tối quan trọng cho Định vị Ước tính (Dead Reckoning) và điều động an toàn. SOG khác biệt với STW chính là do ảnh hưởng của Dòng chảy (Current).
3. Các Công Nghệ Đo Lường Tốc Độ Chuyên Sâu
Các tàu SOLAS thường phải trang bị ít nhất một thiết bị đo STW và một thiết bị đo SOG độc lập.
3.1. Log Điện Từ (EM Log - Electromagnetic Log)
- Nguyên lý: Dựa trên Định luật Cảm ứng Điện từ Faraday. Một cuộn dây nhỏ (Transducer) dưới đáy tàu tạo ra một từ trường. Khi nước (chất dẫn điện) di chuyển cắt ngang từ trường này, một điện áp được tạo ra trong cảm biến. Điện áp này tỷ lệ thuận với tốc độ STW.
- Ưu điểm: Độ chính xác cao, không có bộ phận chuyển động (ít cần bảo trì), đo lường trực tiếp STW.
- Thách thức: Độ chính xác có thể bị ảnh hưởng bởi hà bám hoặc sự thay đổi độ dẫn điện của nước (ví dụ: nước ngọt vs. nước mặn).
3.2. Log Doppler (DVL - Doppler Velocity Log)
-
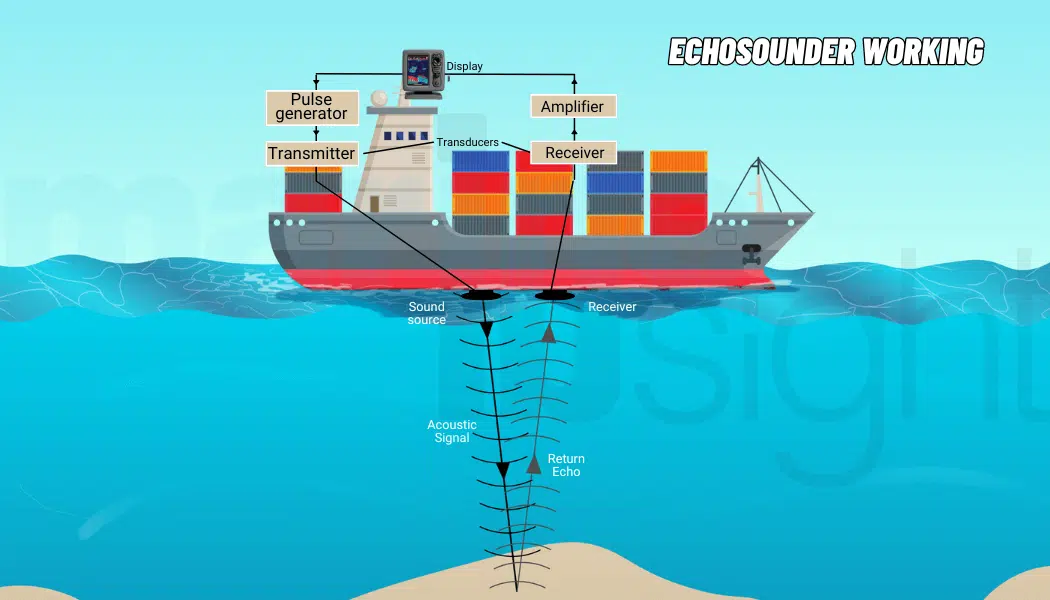
Nguyên lý: DVL phát các chùm sóng âm thanh tần số cao xuống đáy biển. Khi chùm sóng phản xạ trở lại, tần số của nó đã thay đổi (Hiệu ứng Doppler). Sự thay đổi tần số này tỷ lệ thuận với vận tốc tương đối của tàu so với đáy biển.
Công thức Doppler: Δf = 2 × f_t × (v cos θ)/c
Trong đó f_t là tần số phát, v là vận tốc, θ là góc của chùm tia, và c là tốc độ âm thanh.
-
Đo lường Ba Trục: DVL chuyên nghiệp sử dụng ít nhất ba đến bốn chùm tia để đo vận tốc theo ba trục:
- Tốc độ Dọc (Fore/Aft): Vận tốc tiến/lùi.
- Tốc độ Ngang (Port/Starboard): Vận tốc trôi dạt (Drift) do gió/dòng chảy.
- Tốc độ Thẳng đứng (Vertical): Vận tốc lên/xuống (Hieve), quan trọng cho hệ thống giữ vị trí động (Dynamic Positioning - DP).
-
Chế độ Lọc Nước (Water Track Mode): Ở vùng nước quá sâu (thường trên 200m), DVL không thể "khóa" tín hiệu đáy biển và chuyển sang đo vận tốc so với một lớp nước sâu (STW), cho phép SOG chỉ được đo chính xác trong giới hạn độ sâu nhất định.
4. Ứng Dụng Tích Hợp và Quản Lý Hiệu Suất
Dữ liệu từ Speed Log là đầu vào quan trọng cho các hệ thống phức tạp trên tàu.
4.1. Hỗ trợ Điều động và DP
- Cập nhật Vector Vận tốc: Tốc độ Ngang từ DVL là dữ liệu thiết yếu để điều khiển tàu trong các tình huống cập bến hoặc hành hải luồng lạch, nơi trôi dạt ngang có thể gây nguy hiểm.
- Dynamic Positioning (DP): Trong hệ thống DP, DVL là một trong những cảm biến chính, cung cấp SOG chính xác để tàu duy trì vị trí cố định bằng cách chống lại tác động của gió và dòng chảy.
4.2. Tối Ưu Hóa Hiệu Suất Nhiên Liệu (Fuel Efficiency)
- Phân tích Hiệu suất: So sánh STW (hiệu suất thực tế) với SOG (tốc độ hành trình) giúp sĩ quan tính toán chính xác Tác động của Dòng chảy (Current Set and Drift). Điều này cho phép điều chỉnh hướng đi (Steering) để tối ưu hóa tốc độ SOG mong muốn với mức tiêu thụ nhiên liệu tối thiểu (được gọi là Current Compensation).
5. Tiêu Chuẩn Quốc Tế và Yêu Cầu Hiệu Chuẩn
Máy đo tốc độ phải tuân thủ nghiêm ngặt IMO Performance Standards (Resolution A.824(19)) và các tiêu chuẩn của IEC.
- Độ Chính xác Bắt buộc: Độ chính xác của Speed Log cần phải được kiểm tra và hiệu chuẩn định kỳ (thường là trong ụ tàu hoặc trên quãng đường đo lường chuẩn).
- Sai số Hệ thống: Sai số thường xảy ra do lắp đặt lệch trục (Misalignment) hoặc hà bám. Hà bám làm gián đoạn dòng chảy nước qua Transducer (cả EM Log và DVL) và phải được kiểm tra thường xuyên.
Wheelhouse cung cấp các giải pháp Speed Log tiên tiến từ các nhà sản xuất như Furuno (nổi tiếng với DVL độ chính xác cao), JRC và Koden, đảm bảo tuân thủ tiêu chuẩn IMO và tối ưu hóa hiệu suất điều động của tàu.
Để tìm hiểu sâu hơn về các công nghệ Speed Log, giải pháp quản lý hiệu suất nhiên liệu, và dịch vụ hiệu chuẩn, xin vui lòng truy cập trang Solutions của chúng tôi.